![]()
アトラクタに基づくロボットの運動創発
![]()
|
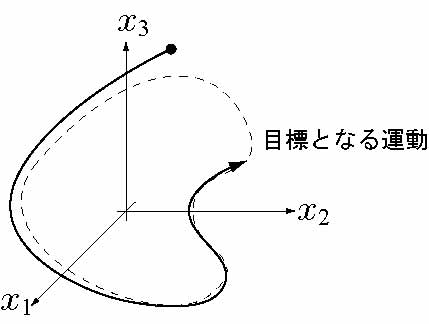
1. アトラクタによるロボットの運動制御 一般に,ロボットはフィードバックコントローラによって安定化され,これに目標値を与えることで運動を生成します.一方,ロボットの運動方程式を
|
![]()
|
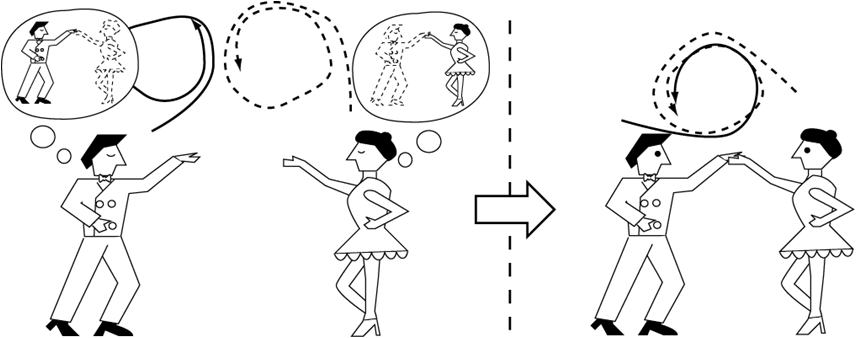
2. アトラクタを利用したロボットのコミュニケーション アトラクタ設計法を2つのロボットに適用し,さらに,コントローラを
|
![]()
|
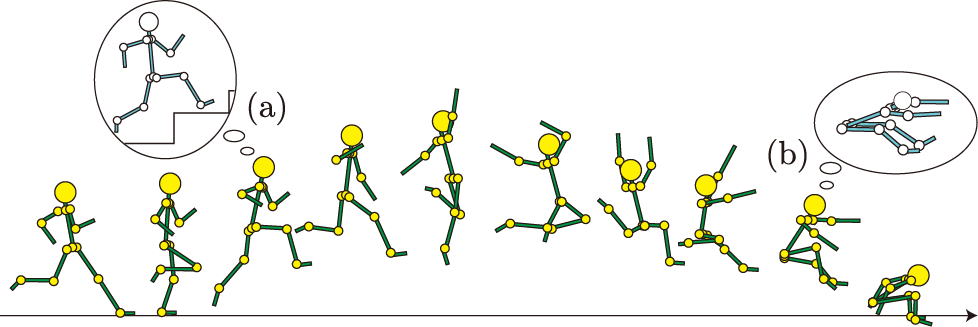
3. 運動伝達のための擬似目標値 下図は走り幅跳びの連続写真を表しています.図の(a),(b)では「階段を駆け上がるように飛ぶ」,「頭と足を前に突き出す」といった説明が付け加えられます.
|
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp