軌道アトラクタに基づく制御系の設計
アトラクタとは
時間発展する系は力学系と呼ばれ,連続時間であれば微分方程式
離散時間であれば差分方程式
で表されます.これが,時間が進むにつれてある軌道に収束するように設計すれば,これは軌道アトラクタを有する力学系を設計したことに相当します.
この力学系は,現在の状態から次の状態を定めます.そのため,外力などにより
x
の動きが変化しても,その値から次の値が定められます.すなわち,動きが
時間の拘束を持ちません
.そのため,人と協働するロボットの制御系に適しています.
1. 場の関数近似による設計手法
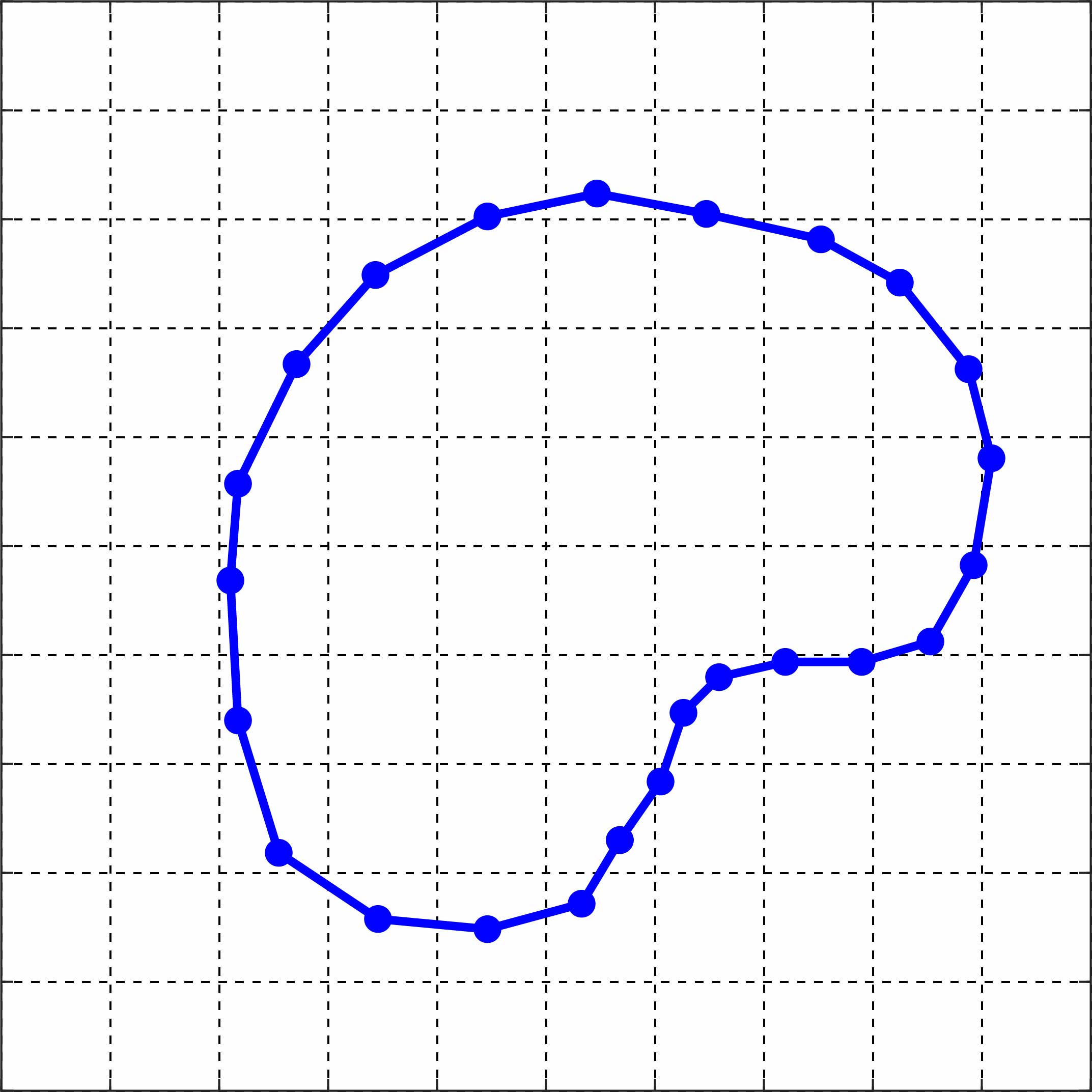
軌道を与えます.
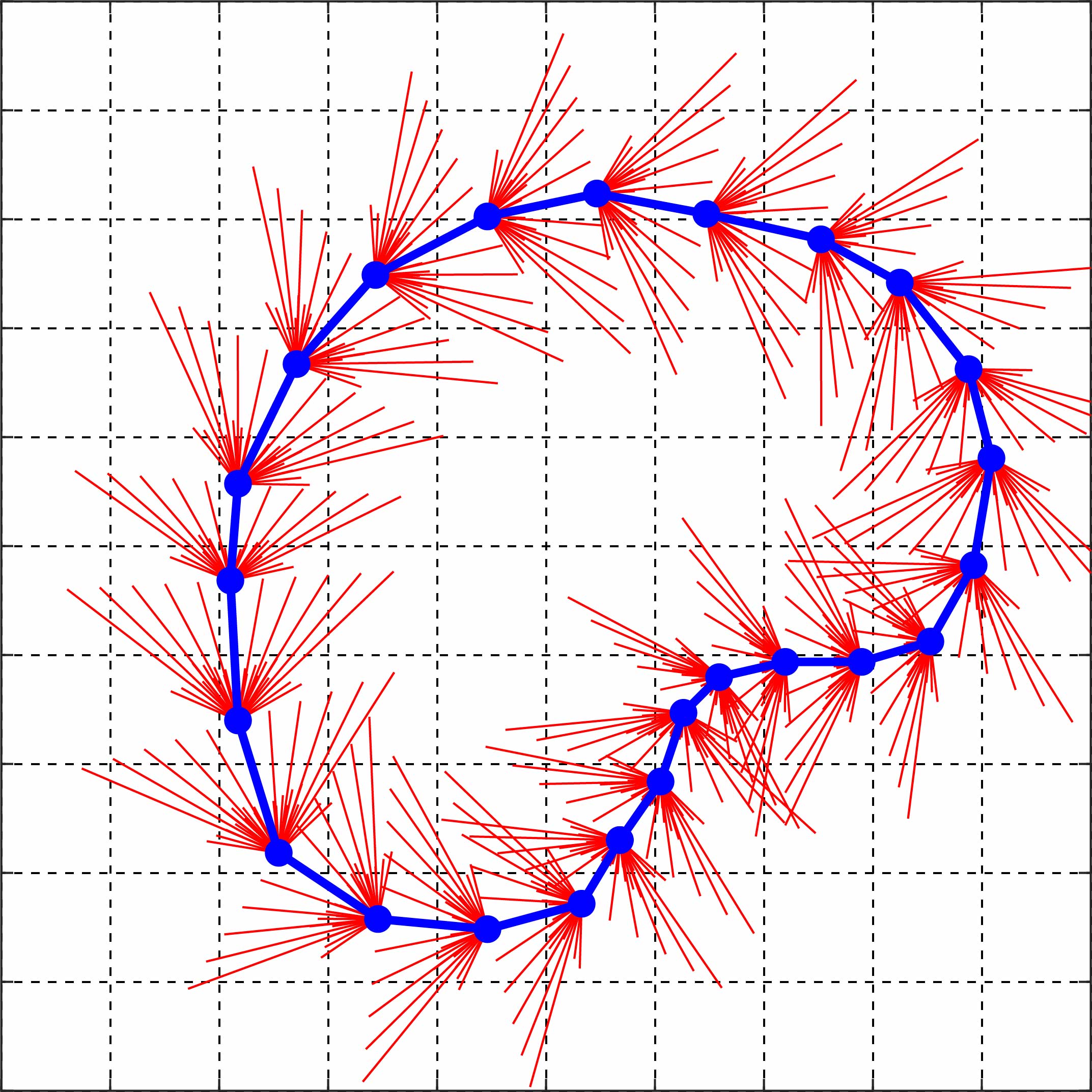
軌道の近傍に点を定義し,次の点に向かうベクトル場を定義します.
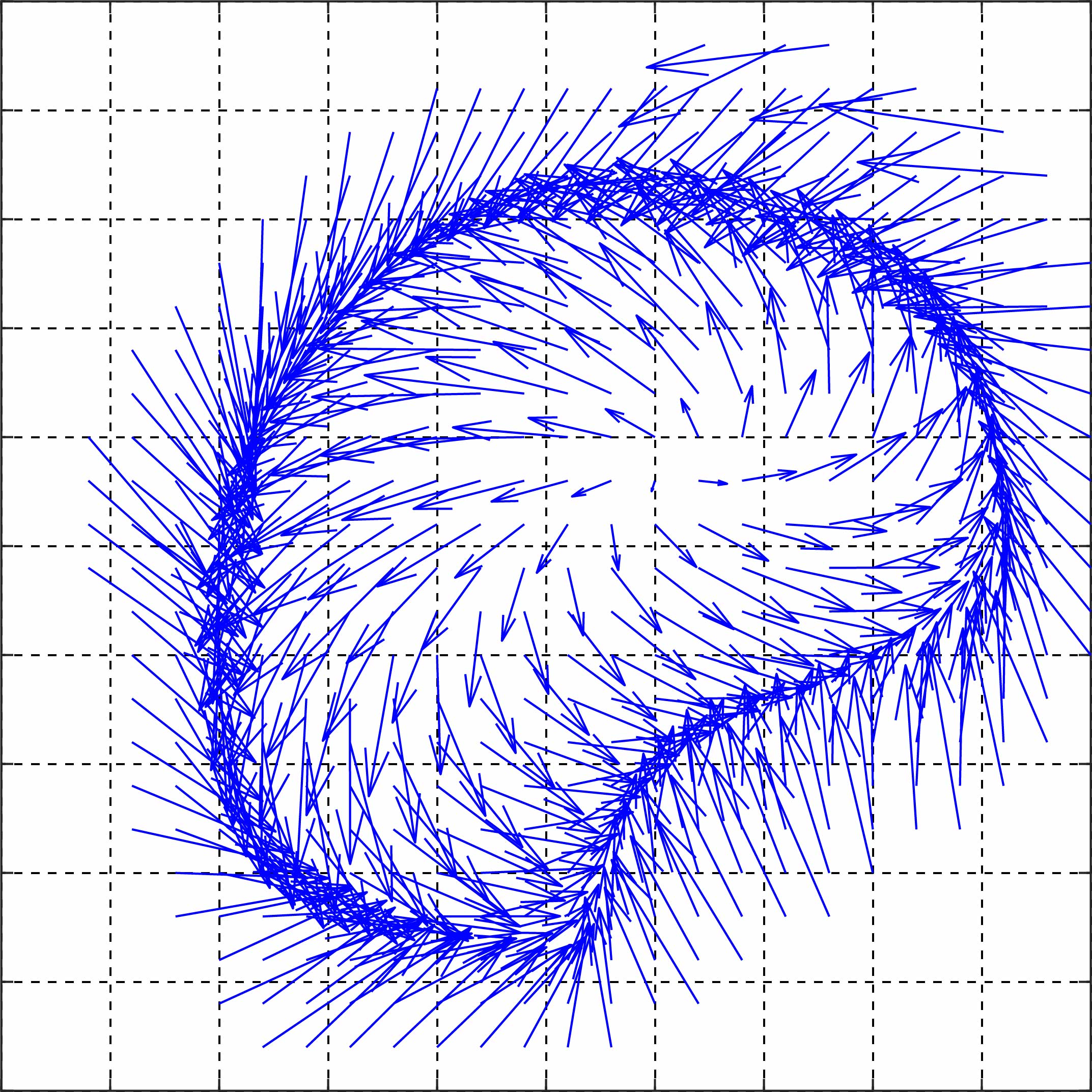
与えたベクトル場を関数近似します.
これで,与えた軌道をアトラクタとする力学系が求められます.
2. 軌道の関数近似による大域的安定アトラクタ
1.の手法では,アトラクタの引き込み領域は場を定義した領域に限られます.そこで,以下の手法により大域的に安定なアトラクタを設計します.
まず,与えた軌道を媒介変数を用いて関数近似します.
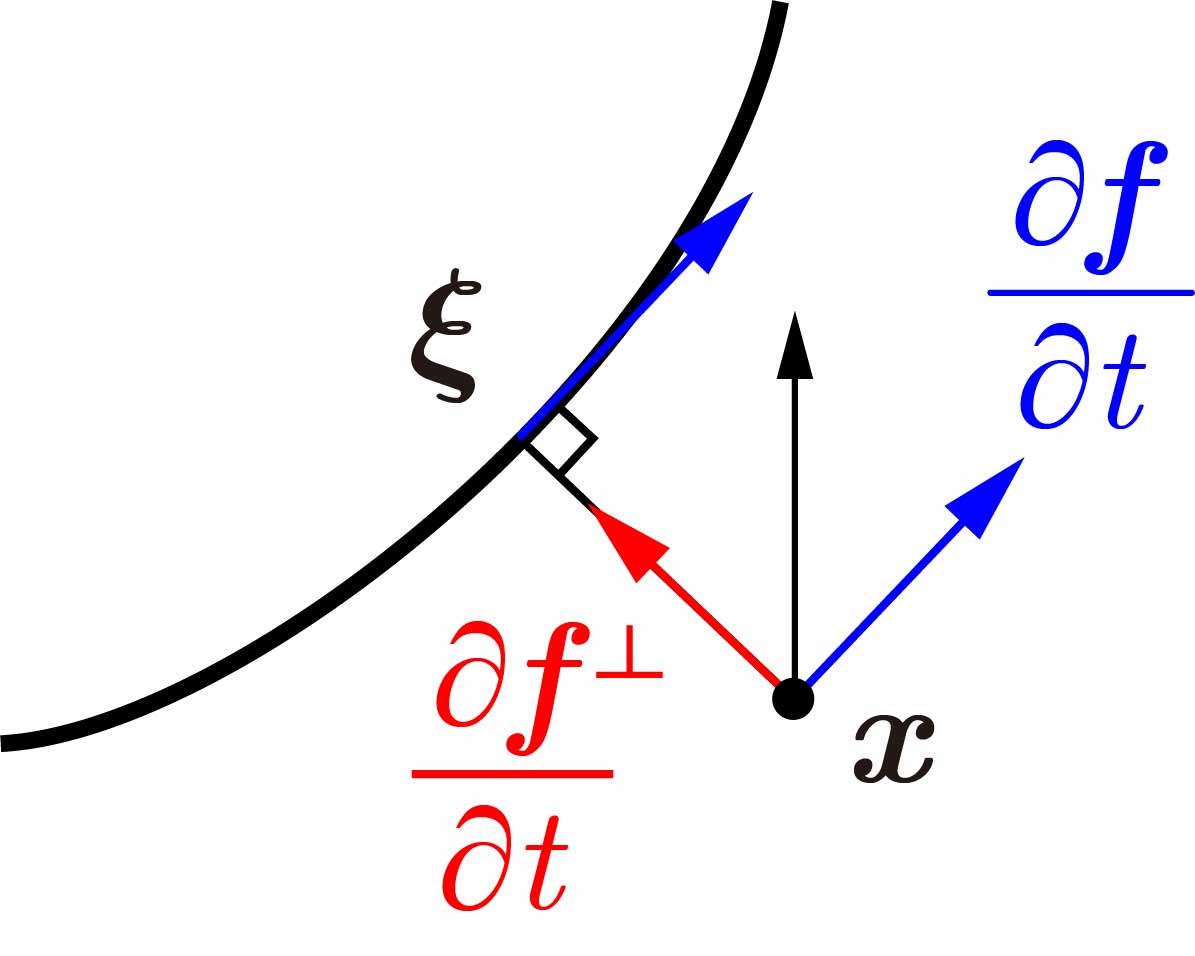
現在の点から最も近い軌道上の点を求めます(媒介変数の探索).
図のように,軌道への収束,次の点に向かうベクトルを求め,
以下の式で次の点を求めます.
これにより,大域的に安定なアトラクタが設計できます.
e-mail :
.m.aa@m.titech.ac.jp