![]()
遠隔掘削のための半自律制御系設計
![]()
|
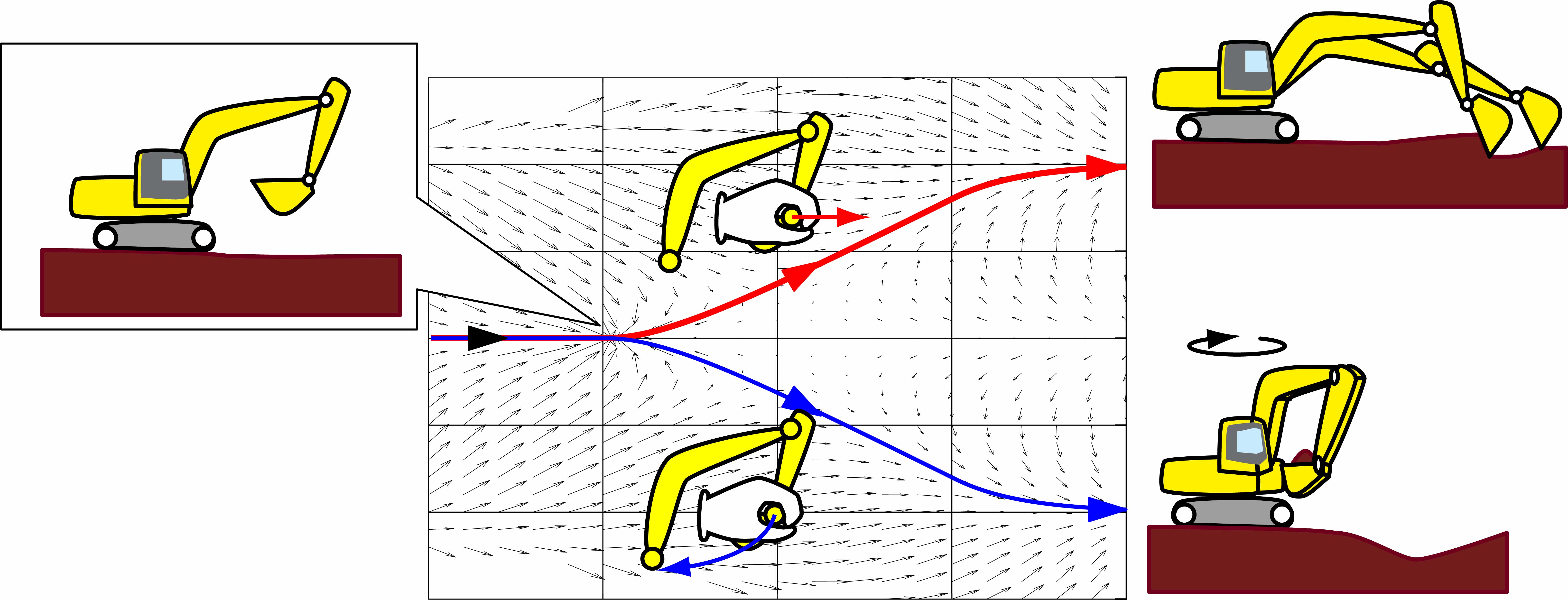
半自律制御系 遠隔操作では,通信のむだ時間等により操作性が著しく劣化します.そのためには,自律制御系が有効ですが,掘削作業のように人が介入する必要があるものでは,人の操作を受け入れる自律制御系が必要です.本研究では,軌道アトラクタに基づく制御系によって自律制御系を設計し,これに人が介入できるメカニズムおよびインターフェースの設計を行っています. |
![]()
|
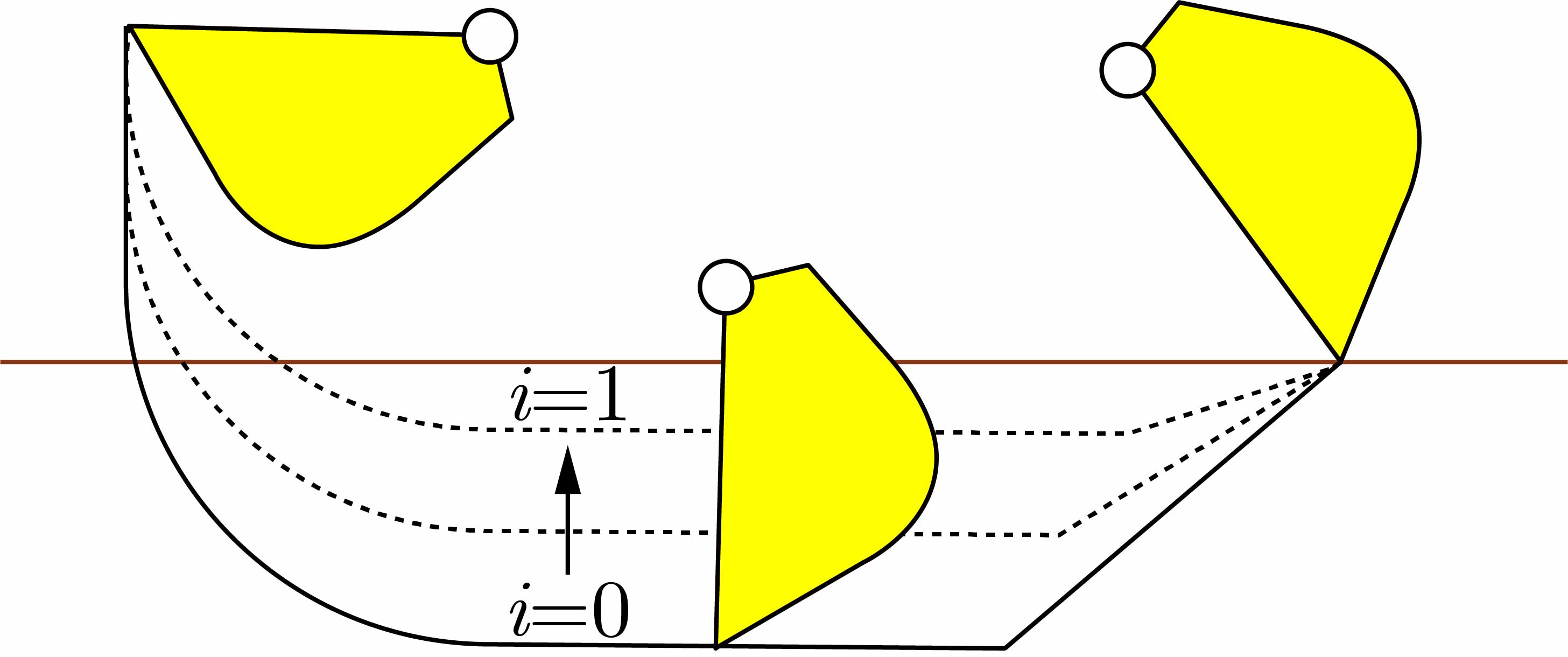
1. 掘削力を制御する半自律系 軌道アトラクタを有する力学系にインデックスiを追加し,次元を拡張します.
|