![]()
Semi-autonomous control for remote excavation
![]()
|
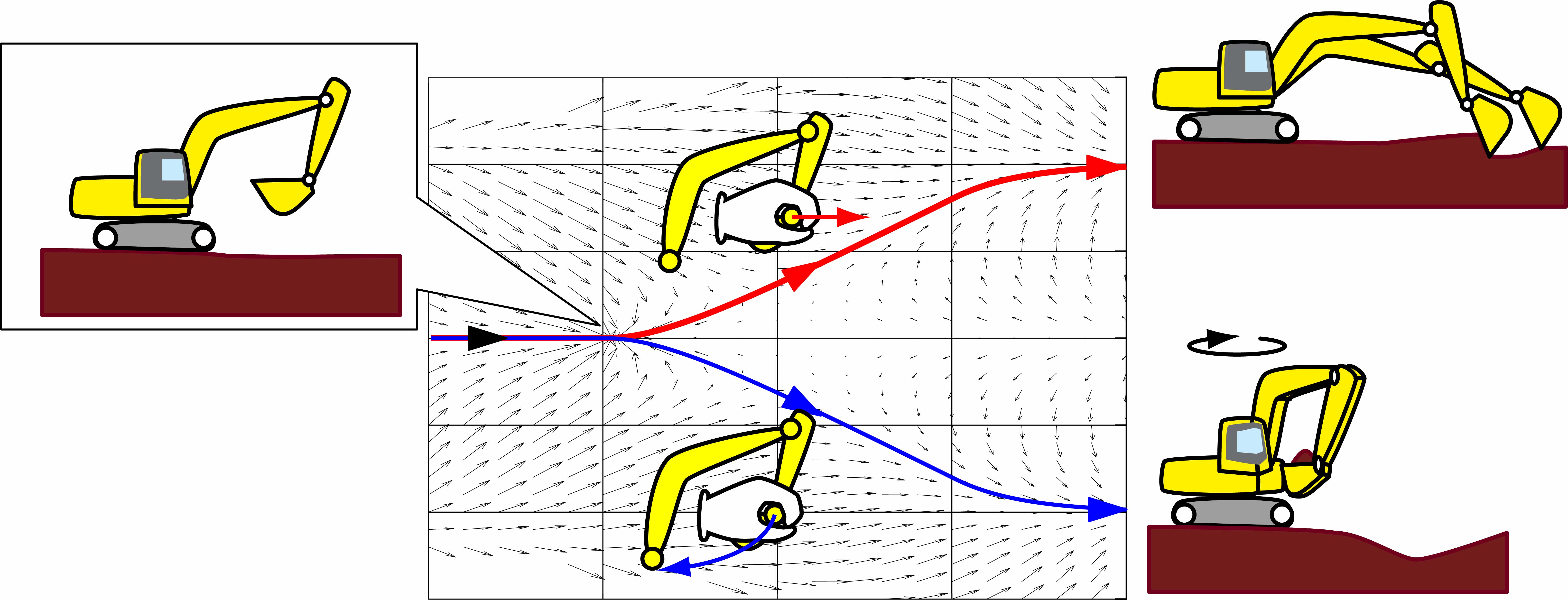
Semi-autonomous control In remote control, operability is significantly degraded due to communication latency and so on. For this reason, an autonomous control system is effective, however an autonomous control system that accepts human operation is required for human intervention, such as drilling operations. In this research, an autonomous control system is designed using a control system based on an orbit attractor, and a mechanism and interface are designed to allow human intervention. |
![]()
|
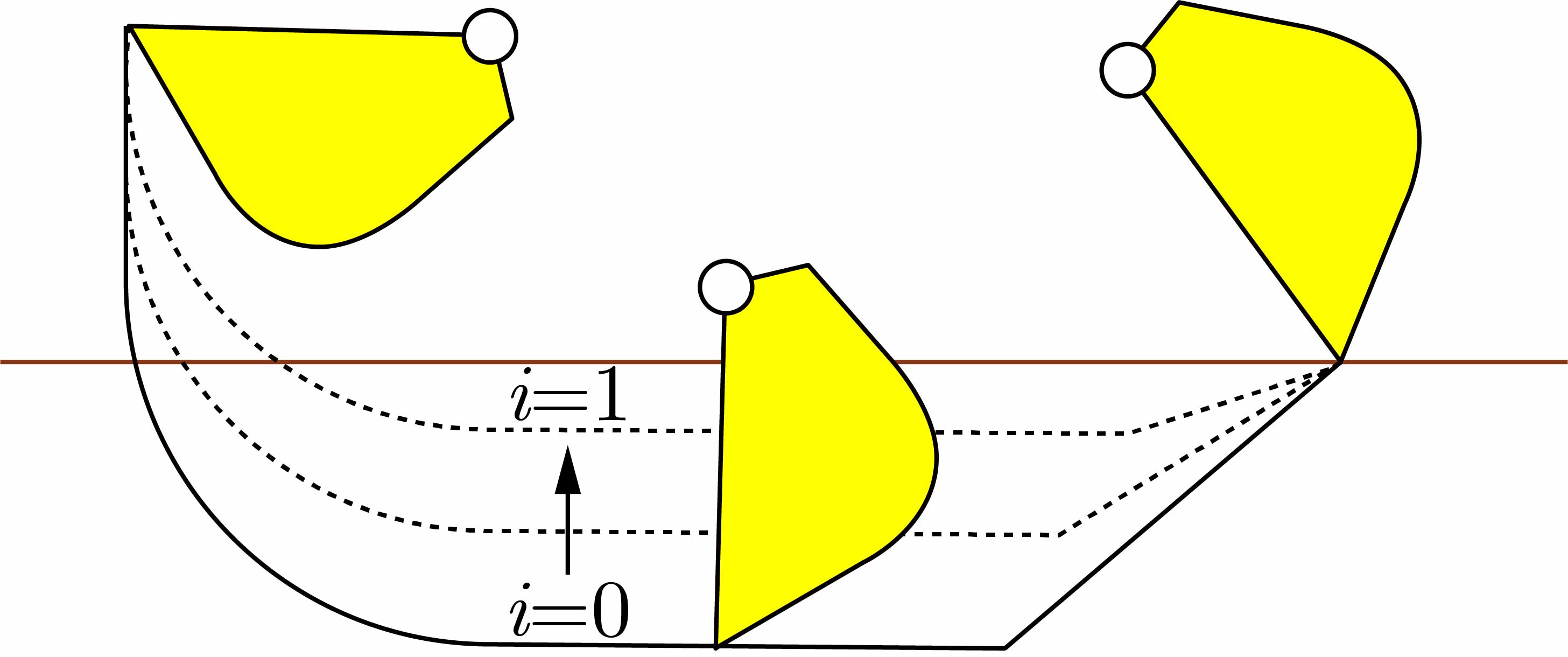
1. Semi-autonomy for force control By adding an index parameter i, the dimension of the dynamics is expanded.
|