![]()
ヒューマノイドロボットの機構開発
![]()
|
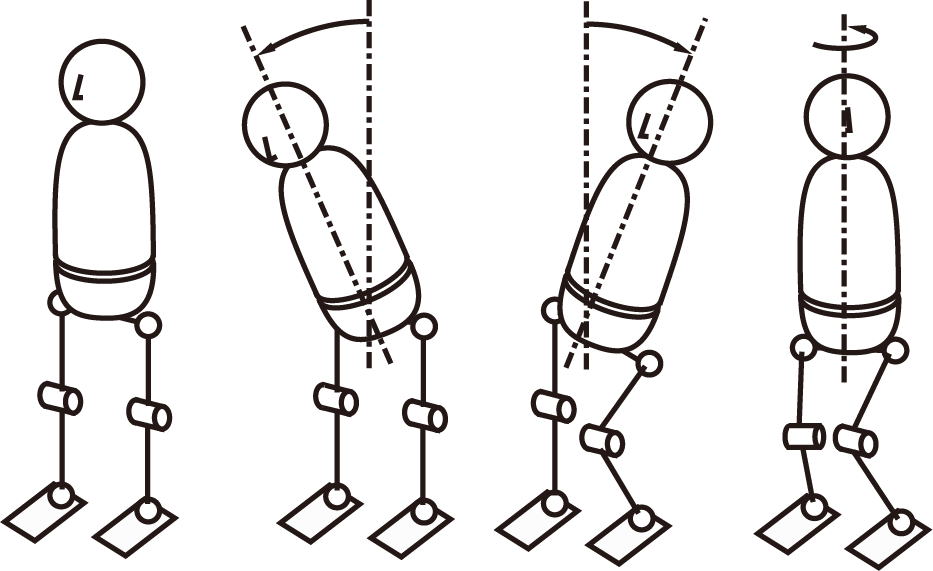
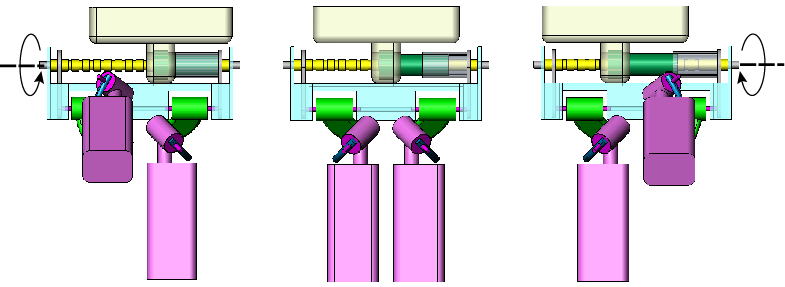
1. 二重球面股関節 人間の脚部,特に,股関節は下左図のように,左右2つに分かれた球対偶で構成されており,脚部の対偶をカップリングさせて動かすことで,上半身に3自由度の回転を発生させます.
|
![]()
|
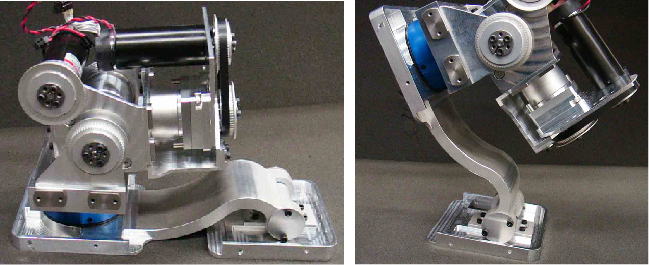
2. ヒューマノイドロボットの設計・試作 二重球面股関節を導入したヒューマノイドロボットを設計試作しました..
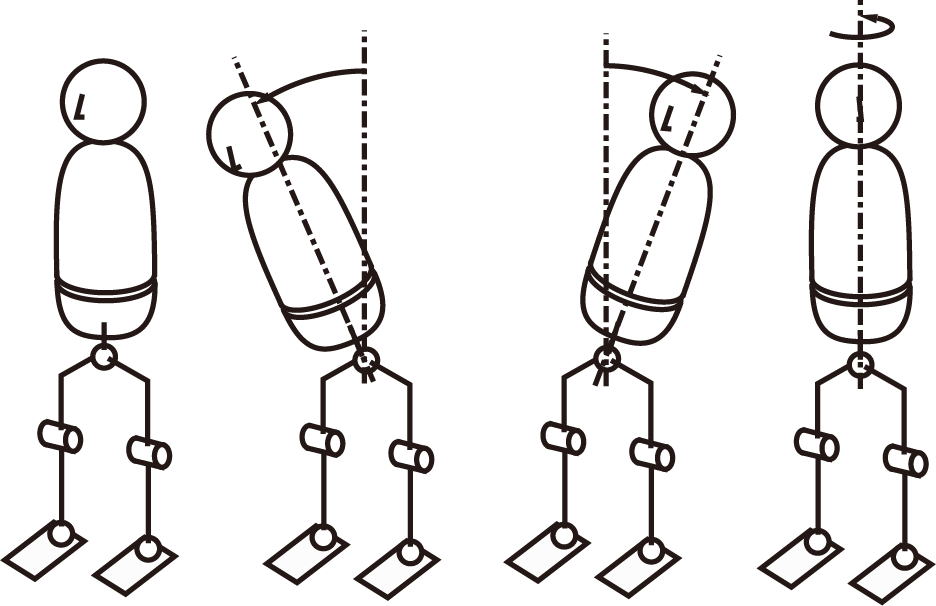
(a) 上半身重心位置補正機構 二重球面股関節は,上半身の左右への動きをしにくくします.そこで下図のように,左右の股関節回転の差によって上半身をスライドさせる,差動型のスライド機構を搭載しています.
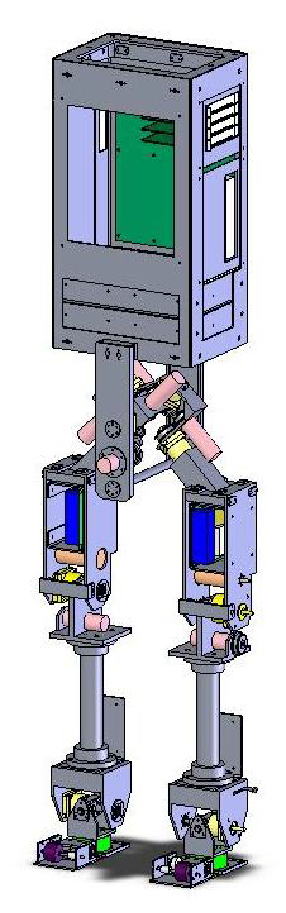
歩行時における床との接触を確実なものにするために,つま先受動対偶を持っています.
モータを駆動するためのモータドライバが各モータの近く分散配置されています.モータドライバにはSH-2が搭載されており,各軸PD制御を行うと同時に,上半身に搭載されたホストPCとRS232Cによってデータ通信します. |
![]()
|
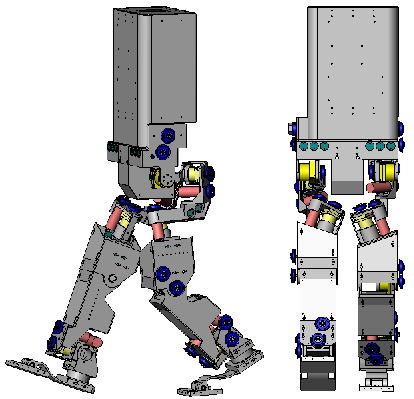
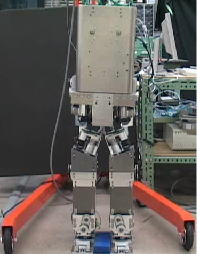
3. 軽量型ヒューマノイドロボットの設計と試作 上記のヒューマノイドロボットの問題点を明確化し,新たなヒューマノイドロボットの設計・試作を行いました.このロボットは以下の特徴を持っています.
軽量化することを目的として,足首ロール軸のアクチュエータを取り除き,受動対偶としました.また,これに伴いピッチ軸周りのアクチュエータを膝関節に搭載することが可能となり,脚部の感性モーメントを小さくすることが可能となりました.
前回のもの同様,受動つま先関節を持っています. (c) 高速分散型制御系 モータドライバとホストPC間の通信にCuNetを導入しました.これは,メモリ共有型の通信方法で,モータドライバとPCがそれぞれメモリを持ち,これらのデータが等しくなるよう,高速の通信が行われています.これにより,PC,モータドライバは各自のメモリにアクセスするだけでデータの読み書きができます. |
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp