|
2. Parameter identificaion via Least Square Method
The parameters p are normally identified from the data of joint angles, angular velocities, angular accelerations and torques obtained by moving the robot based on Least Square Method minimizing the following evaluation function.

However, this is a minimization of the difference between the left and
right sides of the equation of motion and cannot evaluate thet error of
p.

|
3. Stochastic parameter identification
Therefore, in this research, the equation of motion is assumed to be satisfied,
and the inconsistency of the equation of motion is regarded due to stochastic
variation of the parameter.
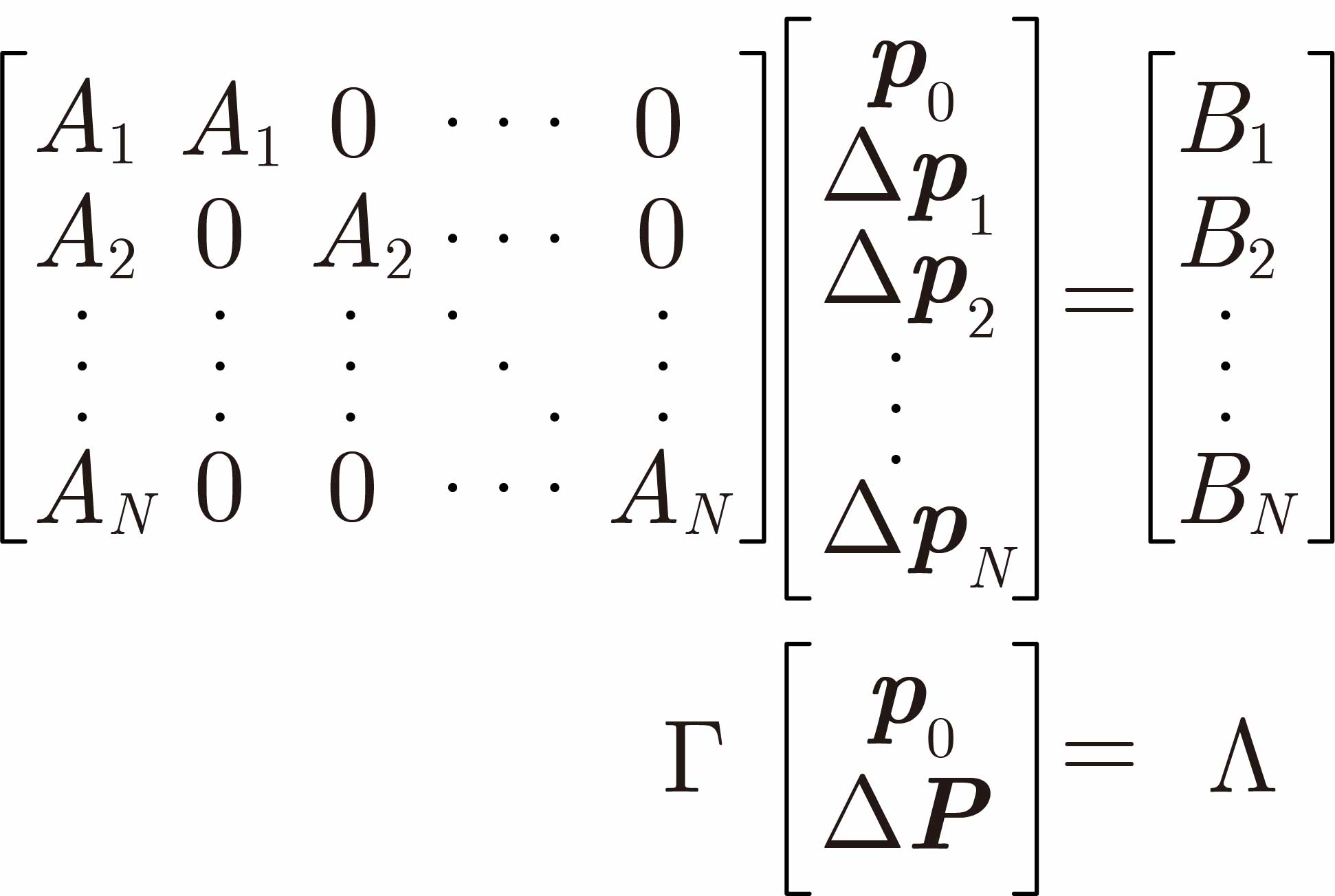
Based on this concept, the following equations are delived.
From this result, the error of p is representd by the following equation using a free parameter.
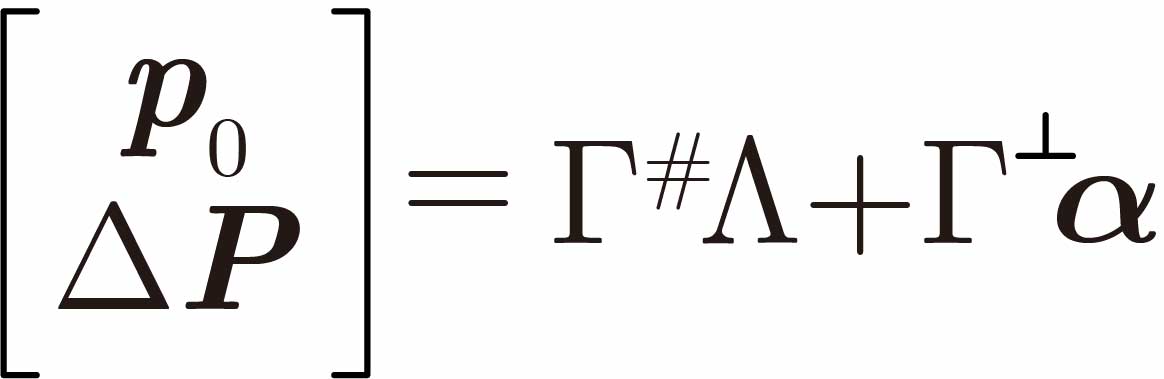
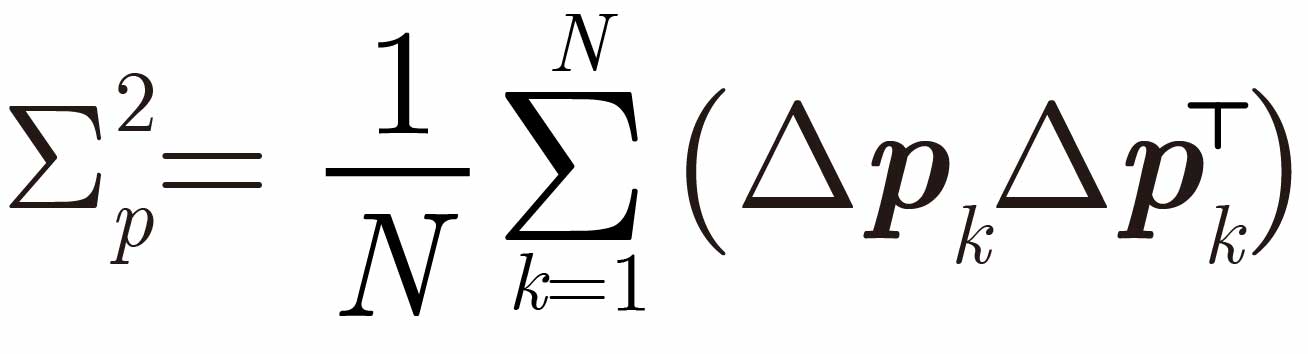
The free parameter is determind so that the self covariance will be the
reference value.
|
|
4. Snsitivity analysis
Here, we specify the self-covariance of the parameter error based on the sensitivity to the robot's end-effector positioning. This allows parameter identification to be accurate for an certain robot motion. This is verified by applying it to the periodic motion of a planar 3-link manipulator.
 |
e-mail :  .m.aa@m.titech.ac.jp .m.aa@m.titech.ac.jp
|