![]()
非線形剛性のための機構総合
![]()
|
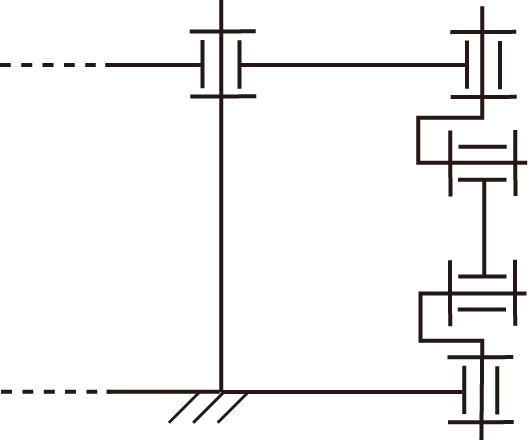
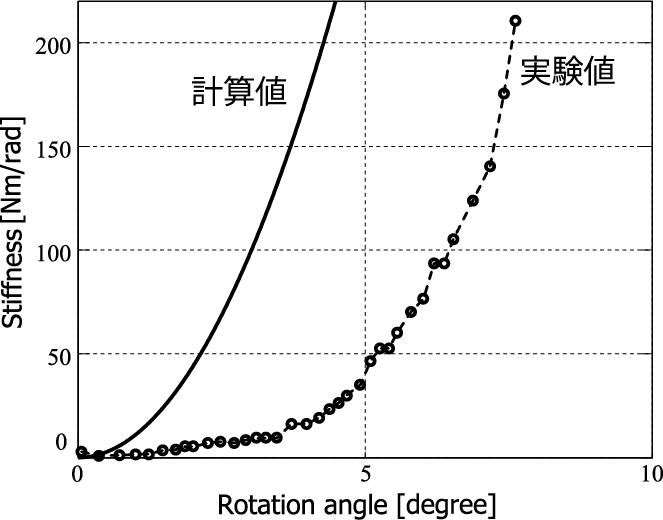
1. 構造的特異性を利用した非線形剛性機構 非線形剛性を実現するためには,材料の剛性非線形性を用いるのが一般的です.例えば,形状記憶合金であればその超弾性を利用することで,柔らかなものを実現することができます.本研究では,線形ばねと機構の非線形性を利用した非線形剛性を実現します.下図は設計した機構を示しています.
|
![]()
|
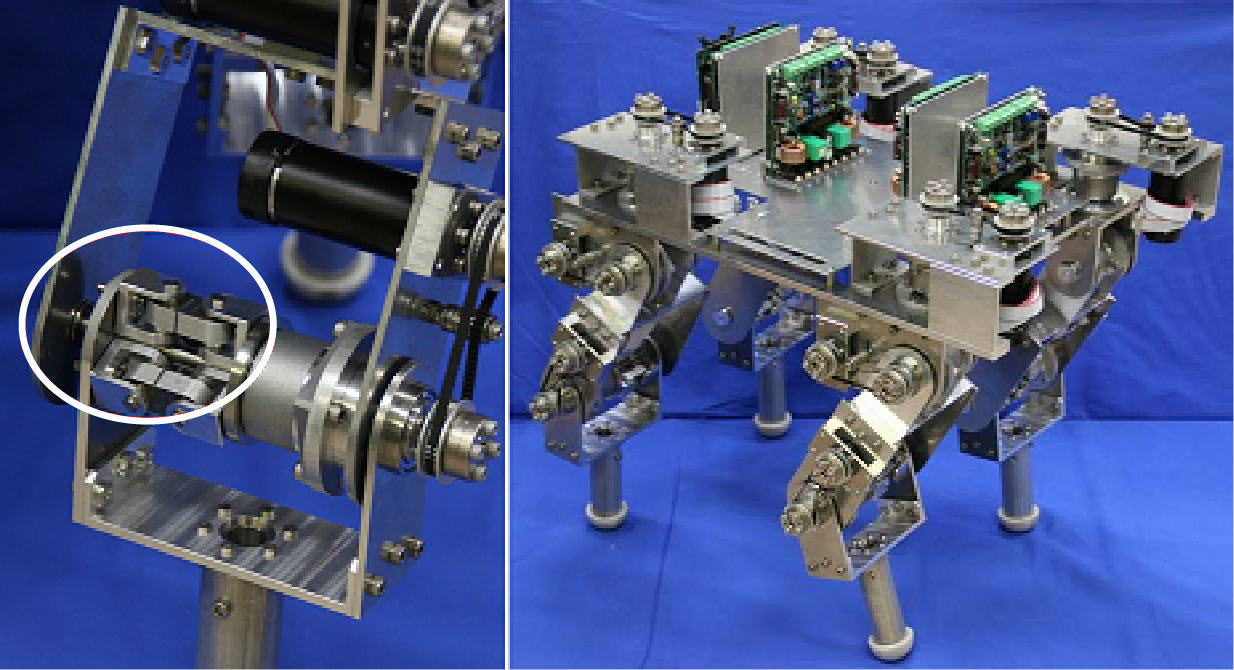
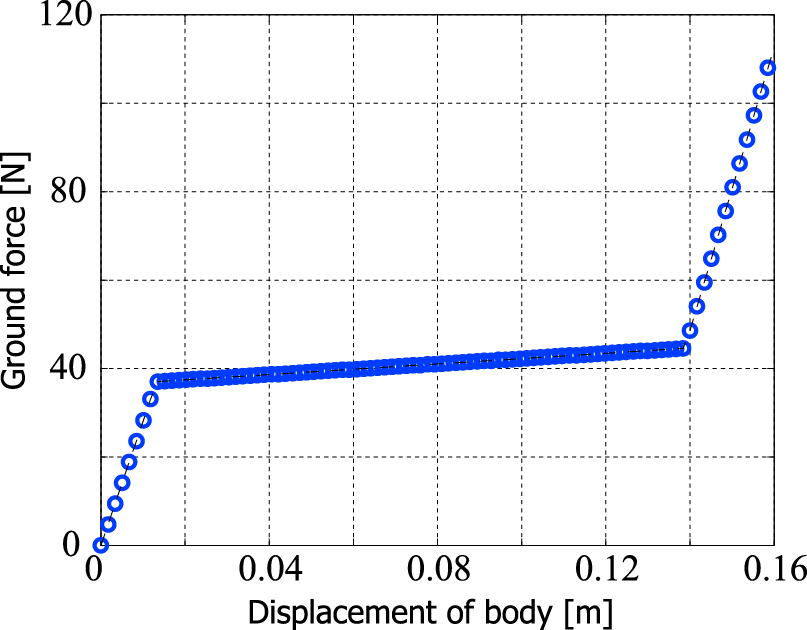
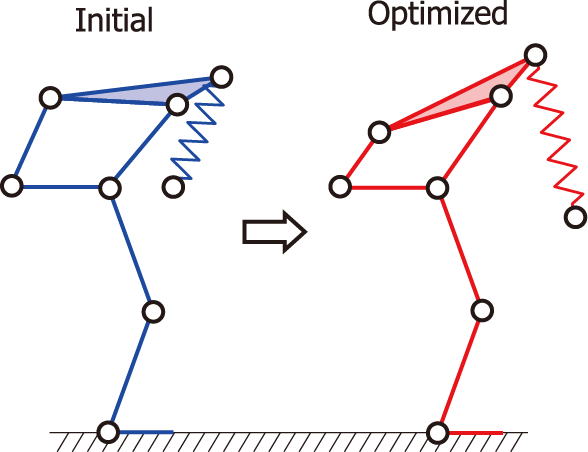
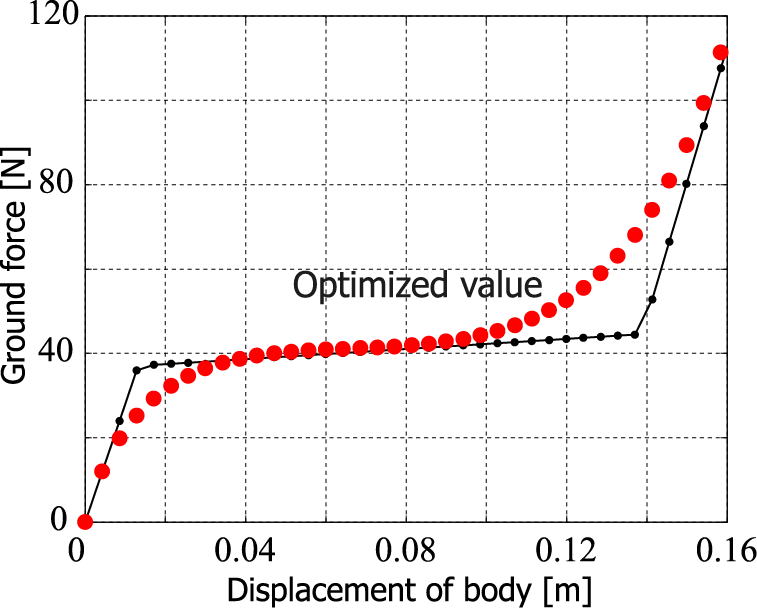
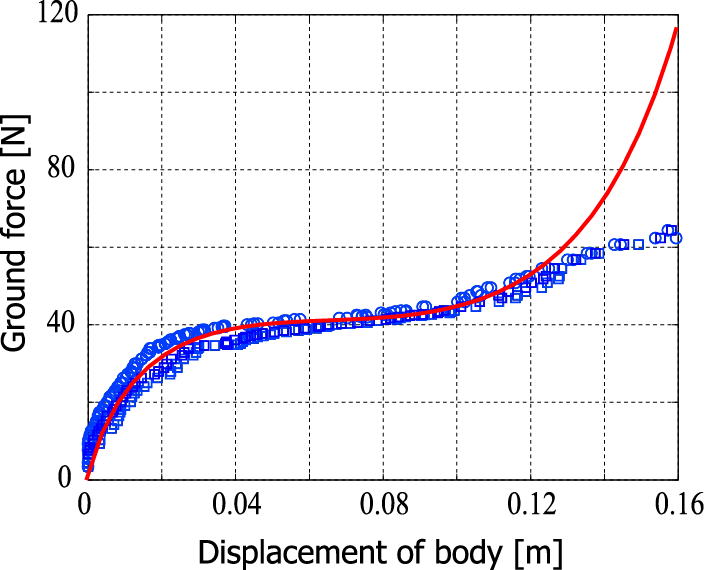
2. 衝撃吸収のための非線形剛性機構総合 本研究では,「ロボットの運動」+「非線形剛性」によって変化する剛性を実現します.そのためには,任意の非線形プロファイルを実現する非線形剛性機構を設計する必要があります.そこで,下図にあるような脚機構を考え,これが右図のような床反力プロファイルを持つよう,リンクの長さ等の最適化を行いました.
|
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp