![]()
群の制御によるアメニティ(快適空間)設計
![]()
|
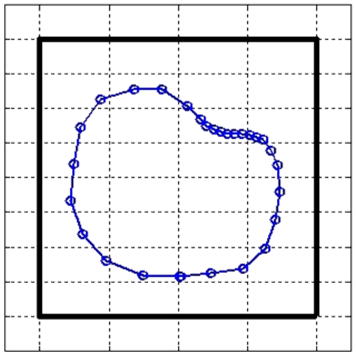
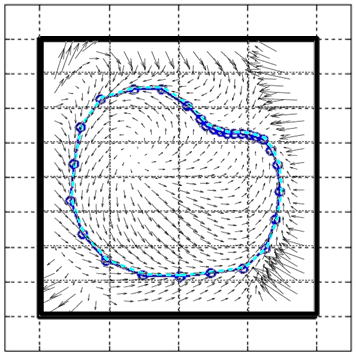
1. ベクトル場と連続体による群のマクロモデル化 多人数からなる群内の個体全ての動きをひとつひとつ記述したのでは膨大な計算が必要となります.そこで,本研究では群をマクロにとらえ,群の意思(全体が向かおうとする動き)をベクトル場でモデル化し,さらに,連続体の密度計算によって混雑度を定量的に評価します.まず,下左図のように,部屋内の人の動きの経路を与えます.次に,右図のようにこの経路に引き込まれるようなベクトル場を設計します.
|
![]()
|
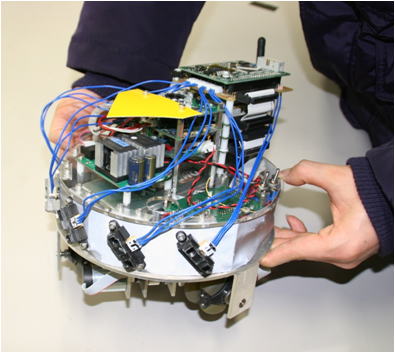
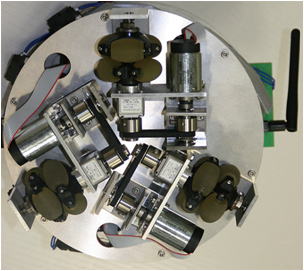
2. 自律移動群ロボットの設計 群誘導制御の検証用として,下図のような自律移動ロボットを試作しました.
|
![]()
|
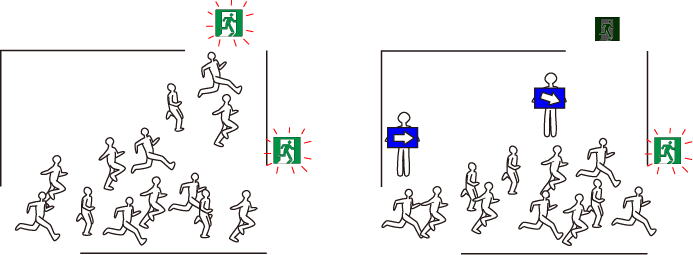
3. 場の最適化による避難誘導のための誘導員配置 下図のように,2つの避難経路があるとき,1つが利用不可能となった場合,適切に誘導員を配置して人々を安全な経路へ誘導する必要があります.
|
![]()
|
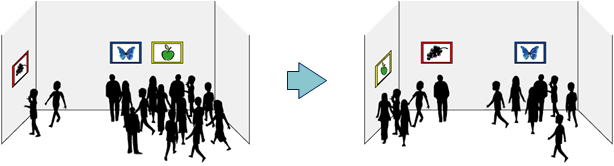
4. 展示場における展示品の配置最適化 下図のように,展示品の配置を変えることで混雑を緩和した快適空間が設計可能です.
|
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp