![]()
Robot motion emergence based on
attractor design
![]()
|
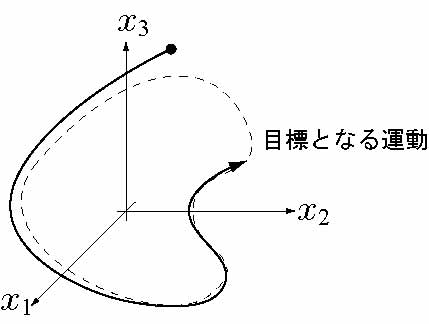
1. Attractor based robot control Robots are stabilized by a feedback controller and robot motion is realized by giving a reference motion pattern to the colosed loop system. On the other hand, consider the robot dynamics as;
|
![]()
|
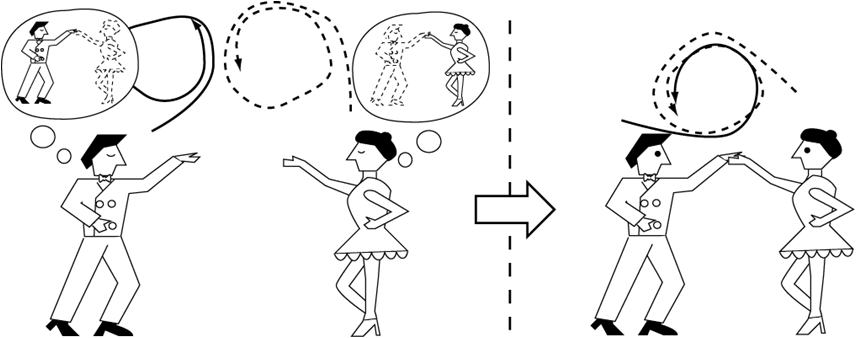
2. Robot-robot communication based on attractor design Attractor design method is employed for two robots, and the controllers are changed as;
|
![]()
|
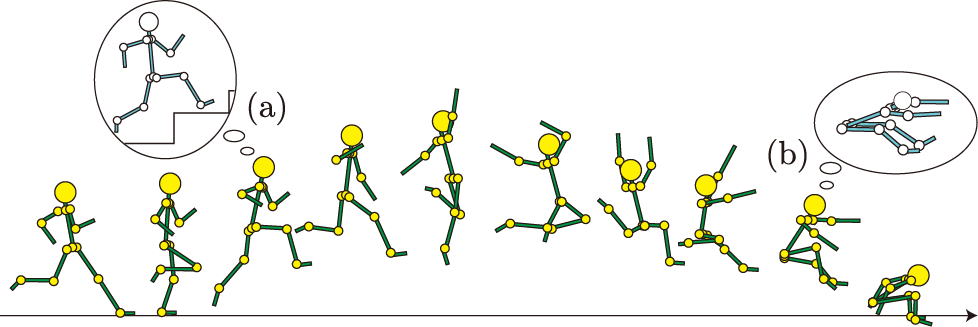
3. Pseudo-reference for motion transfer The following figure shows a successive image of a long jump. We sometimes use comments as "(a) run as if you climb stairs" or "(b) throw up your head and foot".
|
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp