![]()
Mechanical design of humanoid robot
![]()
|
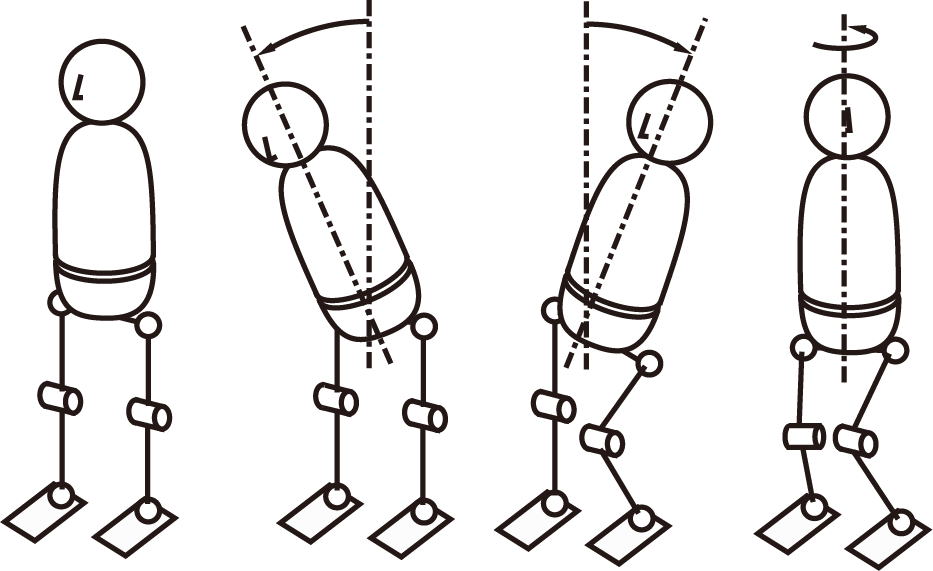
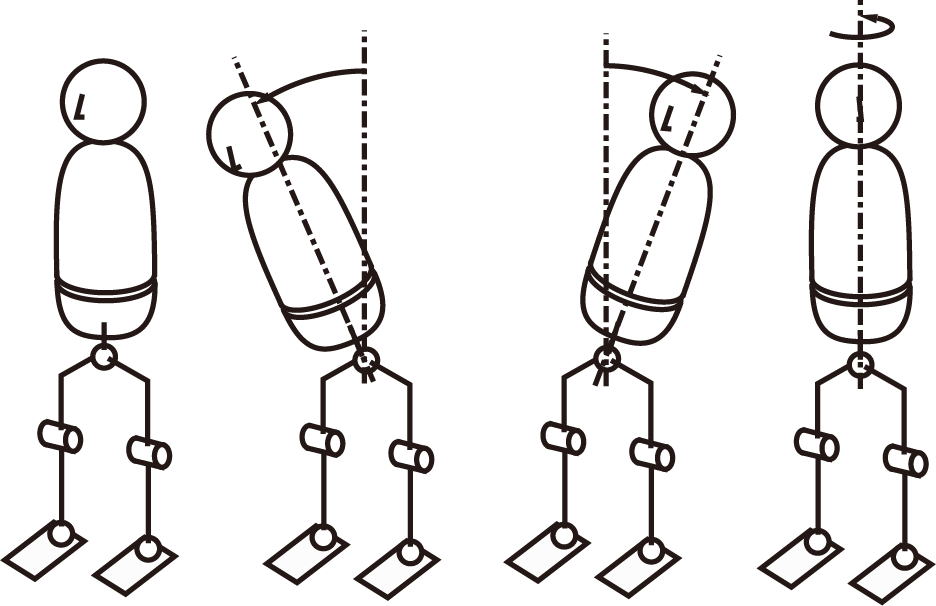
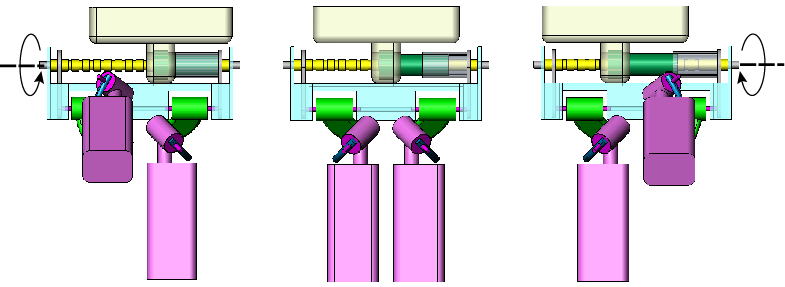
1. Double spherical hip joint The human hip consists of two pherical joints, and the upper body rotates with three degree of freedom.
|
![]()
|
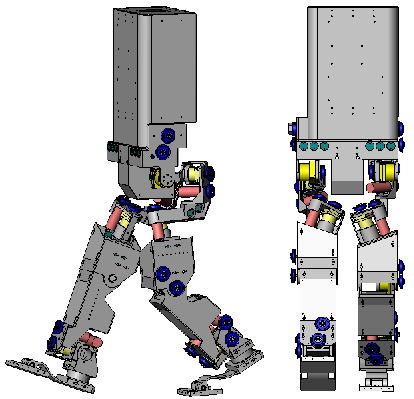
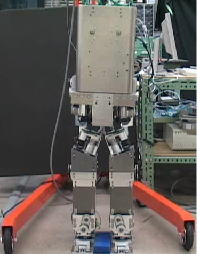
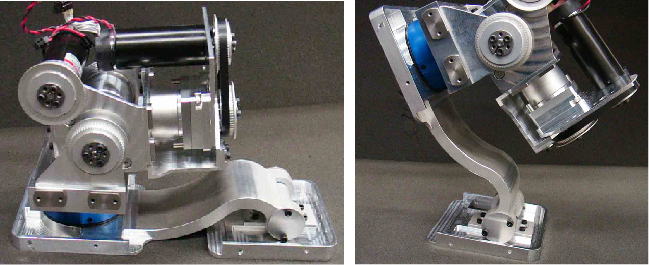
2. Design and prototype of hunamoid robot The following figures show a prototype of a humanoid robot with double spherical hip joint.
(a) Offset mechanism of the upper body The double spherical hip joints is inadequate for translatory motion of the upper body. The designed prototype has an offset mechanism of the upper body as shown in the following figure. The differential between the left and right leg rotation yields the offset of the upper body. It has an advantage for walking.
To ensure the grounding of foot, there is a passive toe joint as shown in the following figures.
Motor drivers that locally PD control the actuators are distributed. The motor driver has SH-2 micro computer and communicates with the host computer in the upper body by RS232C. |
![]()
|
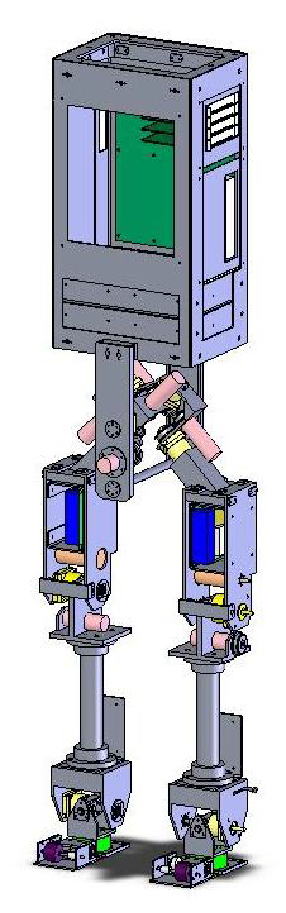
3. Design and prototype of lightweight humanoid robot By clarifing the disadvanteges of the first prototype, the lightweight humanoid robot is designed.
(a) Actuator reduction for lightweight For the purpose of lightweight design, the passive joint is employed in the roll axis of ankle joint. It enables the reduction of inertia of leg mechanism by locating the actuator for pitch axis of ankle joint on the knee.
Same as the previous prototype, the passive toe joint is installed. (c) High-speed distributed control system CuNet is employed for communication between the host computer and motor drivers. CuNet is a shared memory type communication. The host computer and motor drivers have a memory respectively, and CuNet equalizes these memories with high speed. |
![]()
e-mail : ![]() @mep.titech.ac.jp
@mep.titech.ac.jp