|
1. Nonlinear passive stiffness using mechanical singularity
For the realization of nonlinear passive stiffness, a nonlinearity of material
is sometimes utilized. For example, SMA (Shape Memory Alloy) has super
elasticity which realizes low stiffness. In this research, nonlinear passive
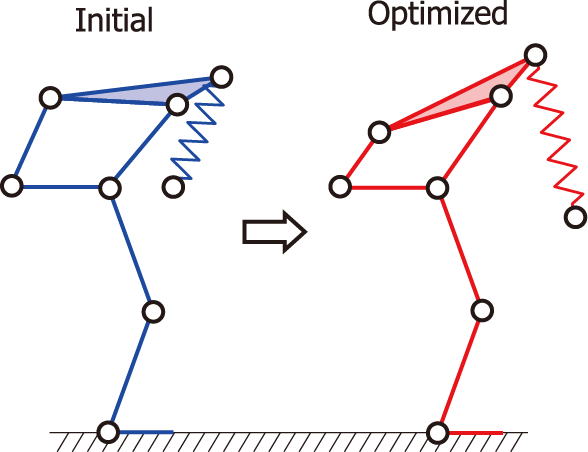
stiffness is realized by a linear spring and nonlinearity of mechanism.
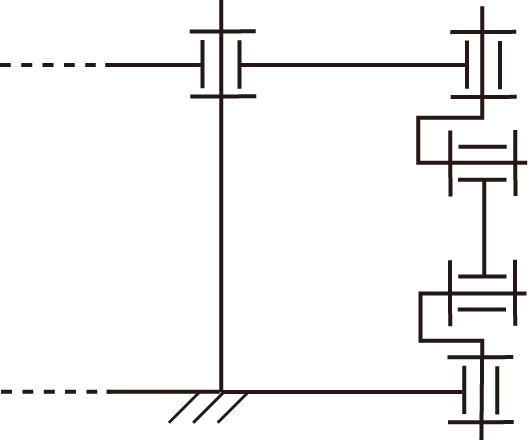
The following figures show the designed mechanism.
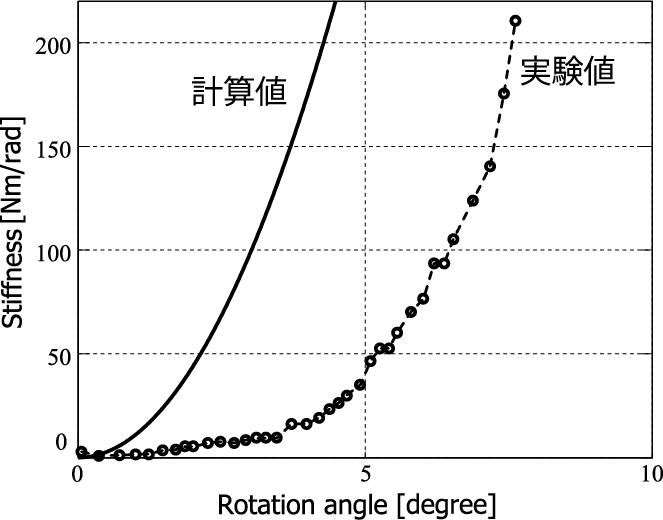
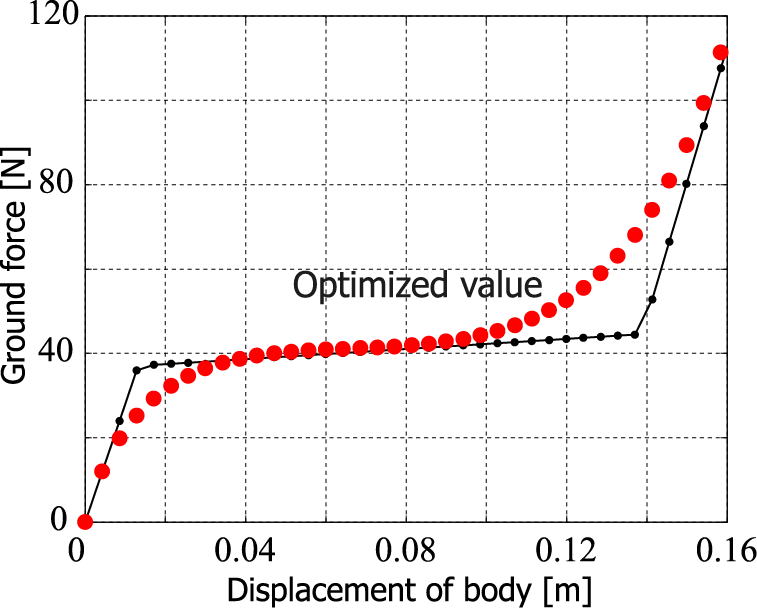
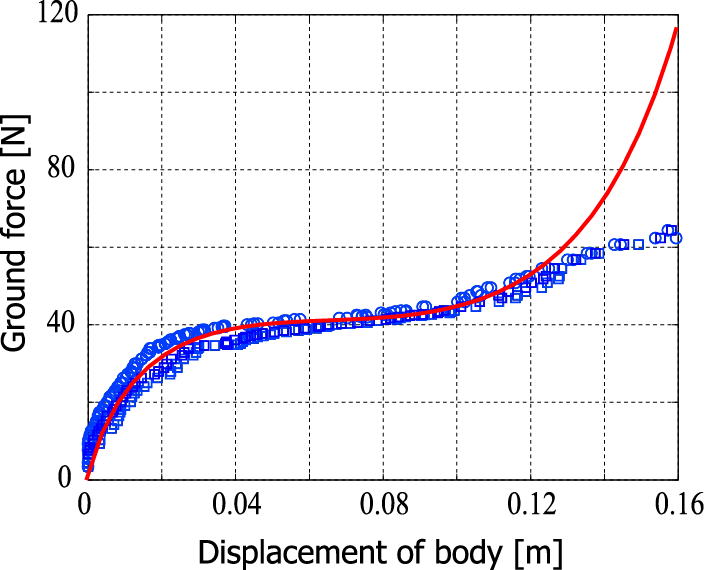
The stiffness profile of this mechanism is shown in the following figure.
The stiffness is zero when the rotational angle equals to zero, which is
realized by mechanical singularity. According to the larger rotational
angle, the stiffness changes to the higher.
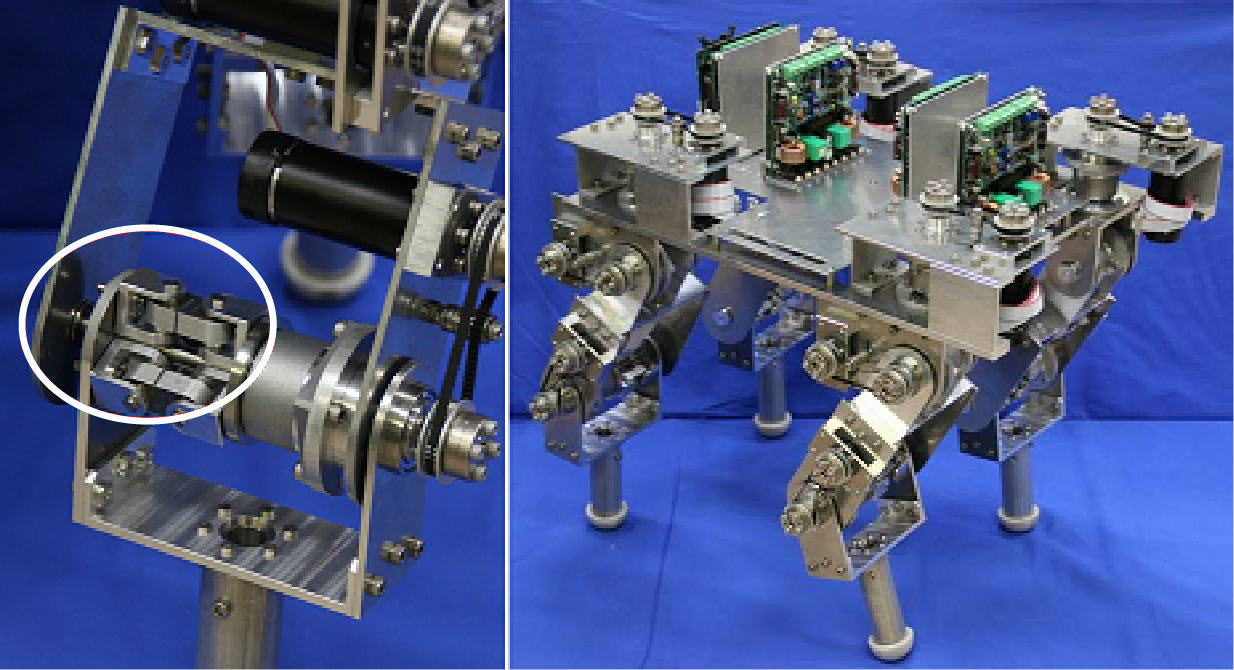
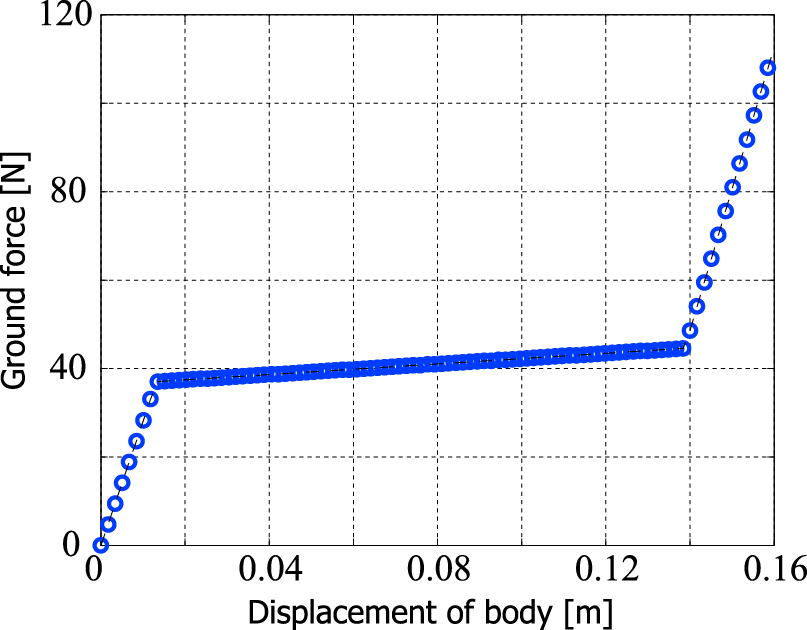
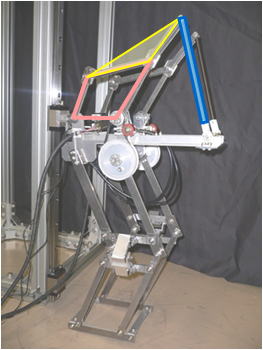
A four legged robot is designed using the proposed mechanism in the knee
joint. |