- Applied Engineering and Science of Biological Tissues -
Overview
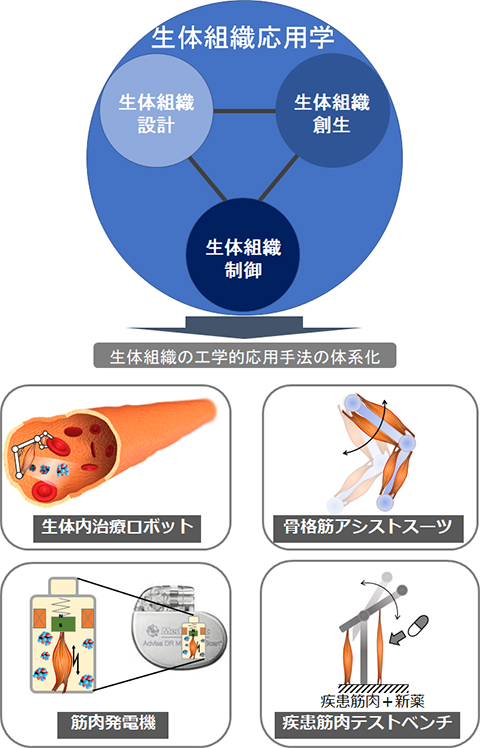
From an engineering perspective, biological tissues can be regarded as entirely novel materials, distinct from conventional industrial materials, as they possess multiple unique properties such as self-repair, self-growth, and biocompatibility.
However, to utilize biological tissues for engineering applications, design, fabrication, and control technologies are indispensable. We define a new academic discipline composed of these three pillars as Applied Engineering of Soft Biological Tissues, and we are committed to fostering its development.
In this research, we particularly focus on the areas of tissue design and control, which are still underdeveloped compared to the rapidly advancing field of tissue fabrication (e.g., cell culture). Specifically, we aim to design skeletal muscles according to desired specifications and to realize actuators that can be freely controlled at will.
Model-Based Design of Skeletal Muscle
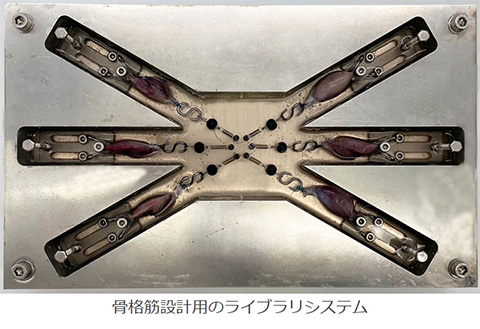
For conventional actuators, specifications such as output or maximum force are defined in advance, and dimensions, shapes, and material compositions are determined accordingly (design). We apply this engineering approach to skeletal muscle actuators as well.
In this study, we establish a methodology to derive the appropriate muscle geometry and muscle type required to achieve the desired specifications. This is accomplished by rapidly solving mathematical models of muscle contraction, where electrical stimulation is treated as input and contraction force or muscle fatigue as output.
Model-Based Control of Skeletal Muscle
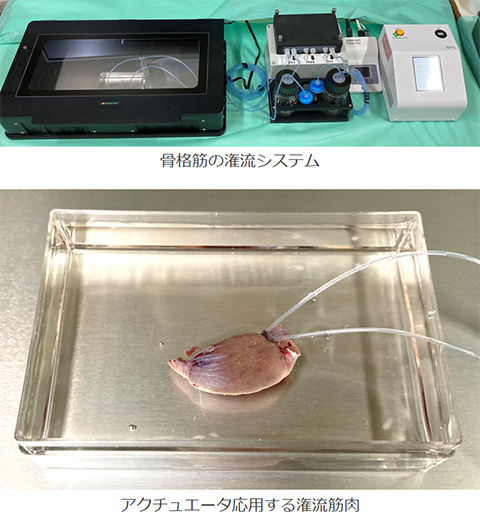
A crucial element in applying skeletal muscle as an actuator is the ability to control the muscle to move as intended.
To this end, our group has developed a nonlinear mathematical model that represents the contraction mechanism of skeletal muscle under external electrical stimulation. By solving this model in real time on a high-performance computer, we derive the necessary electrical stimulation to produce the desired motion, thereby developing model-based control technology.