- Field Charging -
Overview
The use of autonomous mobile robots, such as AGVs, is expanding in applications including factory transport and inspection. These robots are typically powered by onboard batteries, but during charging they must be connected by cables, preventing mobility. Although wireless charging stations have been developed, they require the transmitting coil and the receiving coil on the robot to be aligned face-to-face with a gap of less than 5 cm, demanding extremely high positioning accuracy from the robots.
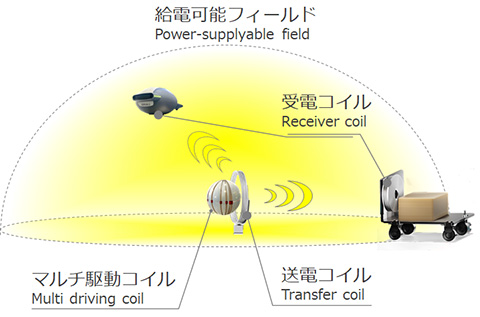
To overcome this limitation, our group is developing a Field Charging System that deploys a power-supplying field around the transmitting coil. As long as the robot is within this field, wireless power transfer is continuously available.
Tracking Method

In this method, the three-dimensional coordinates of the moving robot are fed back using a 3D depth camera. The position and orientation of the transmitting or relay coils are then controlled so that the overall system achieves maximum transmission efficiency.
Normally, when the relative angle between the transmitting and receiving coils reaches 90 degrees, the system enters a singular point where power transfer cannot occur. In our system, however, the coil orientation can be controlled, eliminating such singular points. Furthermore, when the transmitting and receiving coils are farther apart, placing relay coils at optimal positions extends the effective transmission distance.
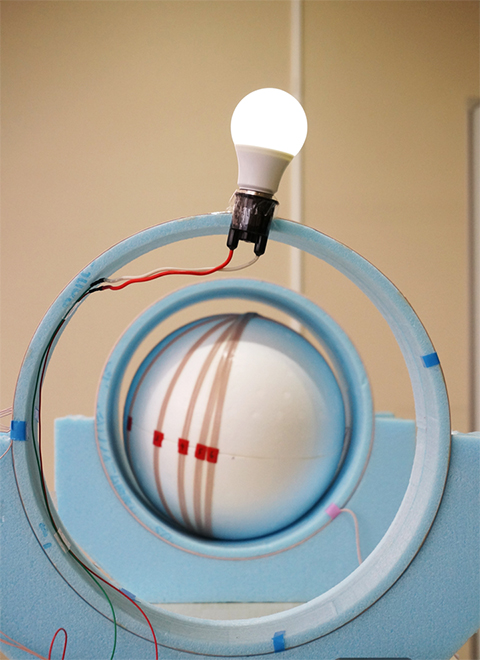
Coil Switching Method
In the tracking method, motors were used to control the position and orientation of the coils. By contrast, in the coil switching method, a new driving coil is placed between the power source and the transmitting coil. This driving coil is wound at various angles over a spherical surface, and depending on the position of the receiving coil and its power consumption state, the system switches between coils at different angles.
This approach eliminates the need for mechanically moving the coils, allowing the overall system to be more compact and lightweight, while also enabling rapid response to the movement of the receiving coil.