-生体組織応用学-
概 要
生体組織を工業的視点で捉えると,通常の工業用材料と異なり,自己修復機能,自己成長機能,生体適合性等を複数備えた全く新規の材料と考えられます.
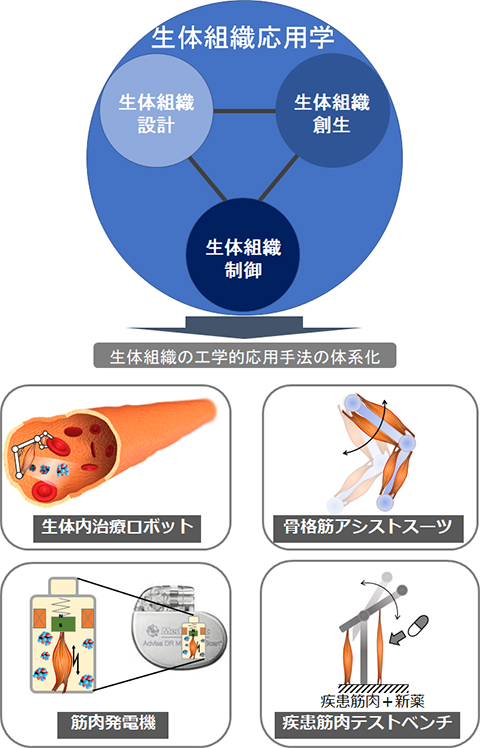
一方,生体組織を工業利用する場合,設計・創成・制御技術が必要です.この3本柱からなる新しい基礎学問を生体組織応用学と名付け,その創発に取り組んでいます.
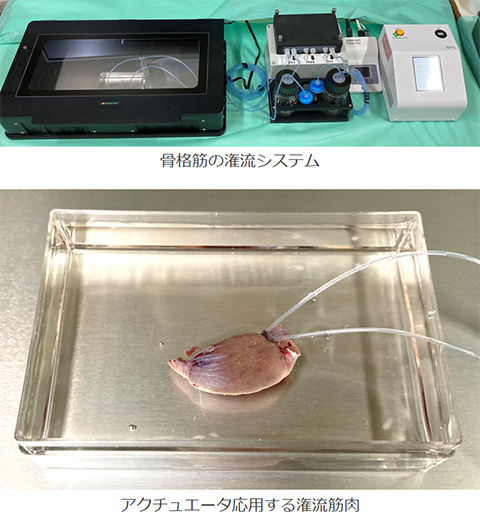
本研究では,日進月歩の進化を遂げている創成(細胞培養)技術に対して未成熟といえる,生体組織の設計・制御に関する研究に取り組んでいます.特に骨格筋を対象として,思い通りに設計し,意のままに操れるアクチュエータの実現を目指しています.
骨格筋のモデルベース設計
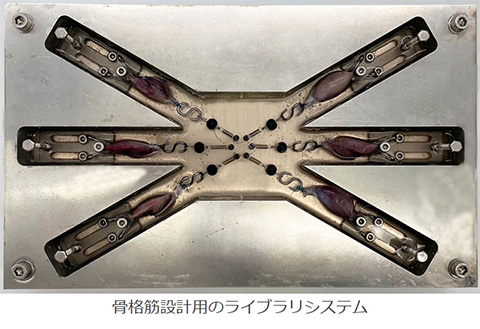
通常のアクチュエータはあらかじめ出力や最大発生力等の仕様が決められ,それに基づいて寸法や形状,材料の組成が決定されます(設計).この工学的手法を骨格筋アクチュエータでも実現します.
本研究では,電気刺激を入力,収縮力や筋疲労を出力とした筋収縮の数理モデルを高速に解くことで,所望のスペックを実現する筋肉形状,筋肉タイプを導く方法論を確立します.
骨格筋のモデルベース制御
骨格筋をアクチュエータ応用するうえで欠かせないのが,こちらの思い通りに筋肉を動かす技術(制御)です.
そこで当グループでは,外部電気刺激に対する骨格筋の収縮機序を,非線形数理モデルで表現しました.このモデルを高速演算可能なPCで解くことで,所望の運動を実現させる電気刺激を導出する,モデルベース制御技術を開発しています.