-フィールドチャージ-
概 要
工場の荷物搬送や点検に,AGVなどの自立移動型ロボットの利用が拡大しています.自立移動型ロボットはバッテリを搭載して運用する方式が一般的ですが,充電の際はケーブルを接続するため,移動ができません.充電ステーションでのワイヤレス給電技術も開発されていますが,送電コイルとロボット(受電コイル)の距離を5cm以下とし,位置ずれなく向かい合う必要があるため,自立移動型ロボットに高い位置決め精度が求められてしまいます.
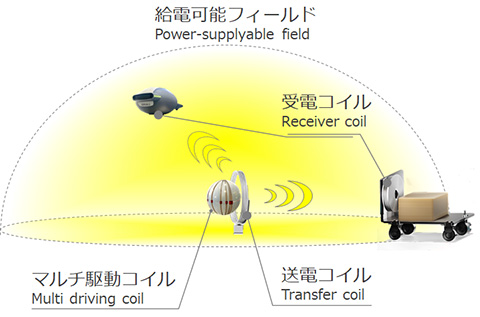
そこで当グループでは,送電コイル周辺に給電フィールドを展開し,その領域内にロボットが存在すれば常にワイヤレス給電が可能なフィールドチャージシステムを開発しています.
トラッキング式

本方式では,3D深度カメラを用いて移動体の3次元座標をフィードバックし,送電コイル,または中継コイルの位置や姿勢をシステム全体の伝送効率が最大となるように制御します.
通常,送電コイルと受電コイルの相対角が90度になると,電力が送れない特異点に入りますが,本システムではコイルの姿勢を制御可能なため,このような特異点が存在しないことが特徴です.また,送電・受電コイル間距離が離れた場合,中継コイルを最適な位置に配することで伝送可能距離を拡大することができます.
コイル切り替え式
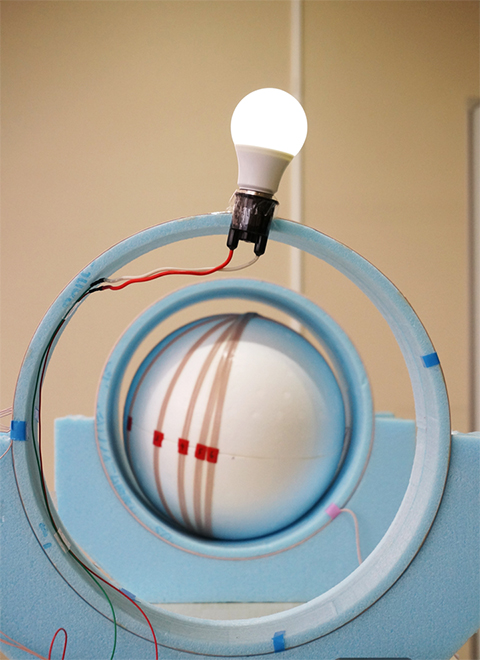
トラッキング式では,モータを使ってコイルの位置と姿勢を制御していました.一方,本テーマで研究しているコイル切り替え式では,電源と送電コイルの間に新たに駆動コイルを設けています.この駆動コイルを球体上に様々な角度で巻き,受電コイルの位置や電力消費状態に応じて,使用する駆動コイルの角度をスイッチで切り替えます.
本方式ではコイルを機械的に動かす必要がないためシステム全体の小型・軽量化に優れるばかりか,受電コイルの動きに素早く対応可能な利点を有します.